Схема подключения ультразвукового датчика. Практические схемы включения датчиков
Новые статьи
● Проект 23: Ультразвуковой датчик расстояния HC-SR04. Принцип работы, подключение, пример
В этом эксперименте мы рассмотрим ультразвуковой датчик для измерения расстояния и создадим проект вывода показаний датчика на экран ЖКИ WH1602.
Необходимые компоненты:
Ультразвуковой дальномер HC-SR04 (рис. 23.1) - это помещенные на одну плату приемник и передатчик ультразвукового сигнала. Излучатель генерирует сигнал, который, отразившись от препятствия, попадает на приемник. Измерив время, за которое сигнал проходит до объекта и обратно, можно оценить расстояние. Кроме самих приемника и передатчика, на плате находится еще и необходимая обвязка, чтобы сделать работу с этим датчиком простой и удобной.
Характеристики ультразвукового дальномера HC-SR04:
Измеряемый диапазон - от 2 до 500 см;
. точность - 0,3 см;
. угол обзора - < 15°;
. напряжение питания - 5 В.
Датчик имеет 4 вывода стандарта 2,54 мм:
VCC - питание +5 В;
. Trig (T) - вывод входного сигнала;
. Echo (R) - вывод выходного сигнала;
. GND - земля.
Последовательность действий для получения данных такова:
Подаем импульс продолжительностью 10 мкс на вывод Trig;
. внутри дальномера входной импульс преобразуется в 8 импульсов частотой 40 кГц и посылается вперед через излучатель T;
. дойдя до препятствия, посланные импульсы отражаются и принимаются приемником R, в результате получаем выходной сигнал на выводе Echo;
. непосредственно на стороне контроллера переводим полученный сигнал в расстояние по формуле:
Ширина импульса (мкс) / 58 = дистанция (см);
-- ширина импульса (мкс) / 148 = дистанция (дюйм).
В нашем эксперименте мы создадим звуковую сигнализацию, которая будет включаться при приближении к плате Arduino на расстояние меньше 1 м. Датчик размещен на кронштейне вращающейся сервы и контролирует пространство с углом обзора 180°. Если датчик обнаруживает объект в радиусе 1 м, подается звуковой сигнал на пьзоизлучатель, вращение сервы прекращается. Схема соединения элементов представлена на рис. 23.2.

Рис. 23.2. Схема соединения элементов для звуковой сигнализации
При написании скетча будем использовать библиотеку Servo для работы с сервоприводом и библиотеку Ultrasonic.
Для работы Arduino с датчиком HC-SR04 имеется готовая библиотека - Ultrasonic.
Конструктор Ultrasonic принимает два параметра: номера пинов, к которым подключены выводы Trig и Echo, соответственно:
Ultrasonic ultrasonic(12,13);
Содержимое скетча показано в листинге 23.1.
#include
Порядок подключения:
1. Закрепляем датчик расстояния HC-SR04 на сервоприводе.
2. Подключаем датчик HC-SR04, пьезозуммер и сервопривод к плате Arduino по схеме на рис. 23.2.
3. Загружаем в плату Arduino скетч из листинга 23.1.
4. Наблюдаем за циклическим перемещением сервопривода, при попадании объекта в поле зрения датчика HC-SR04 пьезозуммер издает сигнал, сервопривод останавливается, при исчезновении объекта из поля зрения датчика сервопривод возобновляет движение.
Листинги программ
Ультразвуковые датчики расстояния Ардуино очень востребованы в робототехнических проектах из-за своей относительной простоты, достаточной точности и доступности. Они могут быть использованы как приборы, помогающие объезжать препятствия, получать размеры предметов, моделировать карту помещения и сигнализировать о приближении или удалении объектов. Одним из распространенных вариантов такого устройства является датчик расстояния, в конструкцию которого входит ультразвуковой дальномер HC SR04. В этой статье мы познакомимся с принципом действия датчика расстояния, рассмотрим несколько вариантов подключения к платам Arduino, схему взаимодействия и примеры скетчей.
Способность ультразвукового датчика определять расстояние до объекта основано на принципе сонара – посылая пучок ультразвука, и получая его отражение с задержкой, устройство определяет наличие объектов и расстояние до них. Ультразвуковые сигналы, генерируемые приемником, отражаясь от препятствия, возвращаются к нему через определенный промежуток времени. Именно этот временной интервал становится характеристикой помогающей определить расстояние до объекта.
Внимание! Так как в основу принципа действия положен ультразвук, то такой датчик не подходит для определения расстояния до звукопоглощающих объектов. Оптимальными для измерения являются предметы с ровной гладкой поверхностью.
Описание датчика HC SR04
Датчик расстояния Ардуино является прибором бесконтактного типа, и обеспечивает высокоточное измерение и стабильность. Диапазон дальности его измерения составляет от 2 до 400 см. На его работу не оказывает существенного воздействия электромагнитные излучения и солнечная энергия. В комплект модуля с HC SR04 arduino также входят ресивер и трансмиттер.
Ультразвуковой дальномер HC SR04 имеет такие технические параметры:
- Питающее напряжение 5В;
- Рабочий параметр силы т ока – 15 мА;
- Сила тока в пассивном состоянии < 2 мА;
- Обзорный угол – 15°;
- Сенсорное разрешение – 0,3 см;
- Измерительный угол – 30°;
- Ширина импульса – 10 -6 с.

Датчик оснащен четырьмя выводами (стандарт 2, 54 мм):
- Контакт питания положительного типа – +5В;
- Trig (Т) – выход сигнала входа;
- Echo (R) – вывод сигнала выхода;
- GND – вывод «Земля».
Где купить модуль SR04 для Ардуино
Датчик расстояния – достаточно распространенный компонент и его без труда можно найти в интернет-магазинах. Самые дешевые варианты (от 40-60 рублей за штуку), традиционно на всем известном сайте.
 Модуль датчика расстояния HC-SR04 для Ардуино Модуль датчика расстояния HC-SR04 для Ардуино
|
 Еще один вариант ультразвукового сенсора HC-SR04 у надежного поставщика Еще один вариант ультразвукового сенсора HC-SR04 у надежного поставщика
|
 Датчики расстояния SR05 Ultrasonic HC-SR05 (улучшенные характеристики) Датчики расстояния SR05 Ultrasonic HC-SR05 (улучшенные характеристики)
|
 Модуль HC-SR05 HY-SRF05 для UNO R3 MEGA2560 DUE от надежного поставщика Модуль HC-SR05 HY-SRF05 для UNO R3 MEGA2560 DUE от надежного поставщика
|
Схема взаимодействия с Arduino
Для получения данных, необходимо выполнить такую последовательность действий:
- Подать на выход Trig импульс длительностью 10 микросек;
- В ультразвуковом дальномере hc sr04 подключенном к arduino произойдет преобразование сигнала в 8 импульсов с частотой 40 кГц, которые через излучатель будут посланы вперед;
- Когда импульсы дойдут до препятствия, они отразятся от него и будут приняты приемником R, что обеспечит наличие входного сигнала на выходе Echo;
- На стороне контроллера полученный сигнал при помощи формул следует перевести в расстояние.
При делении ширины импульса на 58.2, получим данные в сантиметрах, при делении на 148 – в дюймах.
Подключение HC SR04 к Arduino
Выполнить подключение ультразвукового датчика расстояния к плате Arduino достаточно просто. Схема подключения показана на рисунке.

Контакт земли подключаем к выводу GND на плате Arduino, выход питания соединяем с 5V. Выходы Trig и Echo подсоединяем к arduino на цифровые пины. Вариант подключения с помощью макетной платы:

Библиотека для работы с HC SR04
Для облегчения работы с датчиком расстояния HC SR04 на arduino можно использовать библиотеку NewPing. Она не имеет проблем с пинговыми доступами и добавляет некоторые новые функции.
К особенностям библиотеки можно отнести:
- Возможность работы с различными ультразвуковыми датчиками;
- Может работать с датчиком расстояния всего через один пин;
- Отсутствие отставания на 1 секунду при отсутствии пинга эха;
- Для простой коррекции ошибок есть встроенный цифровой фильтр;
- Максимально точный расчет расстояния.
Скачать бибилотеку NewPing можно
Точность измерения расстояния датчиком HC SR04
Точность датчика зависит от нескольких факторов:
- температуры и влажности воздуха;
- расстояния до объекта;
- расположения относительно датчика (согласно диаграммы излучения);
- качества исполнения элементов модуля датчика.
В основу принципа действия любого ультразвукового датчика заложено явление отражения акустических волн, распространяющихся в воздухе. Но как известно из курса физики, скорость распространения звука в воздухе зависит от свойств этого самого воздуха (в первую очередь от температуры). Датчик же, испуская волны и замеряя время до их возврата, не догадывается, в какой именно среде они будут распространяться и берет для расчетов некоторую среднюю величину. В реальных условиях из-за фактора температуры воздуха HC-SR04 может ошибаться от 1 до 3-5 см.
Фактор расстояния до объекта важен, т.к. растет вероятность отражения от соседних предметов, к тому же и сам сигнал затухает с расстоянием.
Также для повышения точности надо правильно направить датчик: сделать так, чтобы предмет был в рамках конуса диаграммы направленности. Проще говоря, “глазки” HC-SR04 должны смотреть прямо на предмет.
Для уменьшения ошибок и погрешности измерений обычно выполняются следующие действия:
- усредняются значения (несколько раз замеряем, убираем всплески, потом находим среднее);
- с помощью датчиков (например, ) определяется температура и вносятся поправочные коэффициенты;
- датчик устанавливается на серводвигатель, с помощью которого мы “поворачиваем голову”, перемещая диаграмму направленности влево или вправо.
Примеры использования датчика расстояния
Давайте рассмотрим пример простого проекта с платой Arduino Uno и датчиком расстояния HC SR04. В скетче мы будем получать значение расстояния до предметов и выводить их в монитор порта в среде Arduino IDE. Вы сможете легко изменить скетч и схему подключения, чтобы датчик сигнализировал о приближении или отдалении предмета.
Подключение датчика к ардуино
При написании скетча использовалась следующий вариант распиновки подключения датчика:
- VCC: +5V
- Trig – 12 пин
- Echo – 11 пин
- Земля (GND) – Земля (GND)
Пример скетча
Начнем работу с датчиком сразу с относительного сложного варианта – без использования внешних библиотек.
В данном скетче мы выполняем такую последовательность действий:
- Коротким импульсом (2-5 микросекунды) переводим датчик расстояния в режим эхолокации, при котором в окружающее пространство высылаются ультразвуковые волны с частотой 40 КГц.
- Ждем, пока датчик проанализирует отраженные сигналы и по задержке определит расстояние.
- Получаем значение расстояния. Для этого ждем, пока HC SR04 выдаст на входе ECHO импульс, пропорциональный расстоянию. Мы определяем длительность импульса с помощью функции pulseIn, которая вернет нам время, прошедшее до изменения уровня сигнала (в нашем случае, до появления обратного фронта импульса).
- Получив время, мы переводим его в расстояние в сантиметрах путем деления значения на константу (для датчика SR04 это 29.1 для сигнала «туда», столько же для сигнала «обратно», что в сумме даст 58.2).
Если датчик расстояния не выполняет считывание сигнала, то преобразование выходного сигнала никогда не примет значения короткого импульса – LOW. Так как у некоторых датчиков время задержки варьируется в зависимости от производителя, рекомендуется при использовании указанных скетчей выставлять его значение вручную (мы это делаем в начале цикла).
Если расстояние составляет более 3 метров, при котором HC SR04 начинает плохо работать, время задержки лучше выставлять более 20 мс, т.е. 25 или 30 мс.
#define PIN_TRIG 12 #define PIN_ECHO 11 long duration, cm; void setup() { // Инициализируем взаимодействие по последовательному порту Serial.begin (9600); //Определяем вводы и выводы pinMode(PIN_TRIG, OUTPUT); pinMode(PIN_ECHO, INPUT); } void loop() { // Сначала генерируем короткий импульс длительностью 2-5 микросекунд. digitalWrite(PIN_TRIG, LOW); delayMicroseconds(5); digitalWrite(PIN_TRIG, HIGH); // Выставив высокий уровень сигнала, ждем около 10 микросекунд. В этот момент датчик будет посылать сигналы с частотой 40 КГц. delayMicroseconds(10); digitalWrite(PIN_TRIG, LOW); // Время задержки акустического сигнала на эхолокаторе. duration = pulseIn(PIN_ECHO, HIGH); // Теперь осталось преобразовать время в расстояние cm = (duration / 2) / 29.1; Serial.print("Расстояние до объекта: "); Serial.print(cm); Serial.println(" см."); // Задержка между измерениями для корректной работы скеча delay(250); }
Скетч с использованием библиотеки NewPing
Теперь давайте рассмотрим вариант скетча с использованием библиотеки NewPing. Код существенно упростится, т.к. все описанные ранее действия спрятаны внутри библиотеки. Все, что нам нужно сделать – создать объект класса NewPing, указав пины, с помощью которых мы подключаем датчик расстояния и использовать методы объекта. В нашем примере для получения расстояния в сантиметрах нужно использовать ping_cm().
#include
Пример подключения ультразвукового дальномера HC SR04 с одним пином
Подключение HC-SR04 к Arduino может быть выполнено посредством использования одного пина. Такой вариант пригодится, если вы работаете с большим проектом и вам не хватает свободных пинов. Для подключения вам нужно просто установить между контактами TRIGи ECHO резистор номиналом 2.2K и подключить к ардуино контакт TRIG.
#include
Краткие выводы
Ультразвуковые датчики расстояния достаточно универсальны и точны, что позволяет их использовать для большинства любительских проектов. В статье рассмотрен крайне популярный датчик HC SR04, который легко подключается к плате ардуино (для этого следует сразу предусмотреть два свободных пина, но есть вариант подключения и с одним пином). Для работы с датчиком существуют несколько бесплатных библиотек (в статье рассмотрена лишь одна из них, NewPing), но можно обойтись и без них – алгоритм взаимодействия с внутренним контроллером датчика достаточно прост, мы показали его в этой статье.
Исходя из собственного опыта, можно утверждать, что датчик HC-SR04 показывает точность в пределах одного сантиметра на расстояниях от 10 см до 2 м. На более коротких и дальних дистанциях возможно появление сильных помех, что сильно зависит от окружающих предметов и способа использования. Но в большинстве случаев HC-SR04 отлично справлялся со своей работой.
Дальномер — это устройство для измерения расстояния до некоторого предмета. Дальномер помогает роботам в разных ситуациях. Простой колесный робот может использовать этот прибор для обнаружения препятствий. Летающий дрон использует дальномер для баражирования над землей на заданной высоте. С помощью дальномера можно даже построить карту помещения, применив специальный алгоритм SLAM.
1. Принцип действия
На этот раз мы разберем работу одного из самых популярных датчиков — ультразвукового (УЗ) дальномера. Существует много разных модификаций подобных устройств, но все они работают по принципу измерения времени прохождения отраженного звука. То есть датчик отправляет звуковой сигнал в заданном направлении, затем ловит отраженное эхо и вычисляет время полета звука от датчика до препятствия и обратно. Из школьного курса физики мы знаем, что скорость звука в некоторой среде величина постоянная, но зависящая от плотности среды. Зная скорость звука в воздухе и время полета звука до цели, мы можем рассчитать пройденное звуком расстояние по формуле:
s = v*t
где v — скорость звука в м/с, а t — время в секундах. Скорость звука в воздухе, кстати, равна 340.29 м/с.
Чтобы справиться со своей задачей, дальномер имеет две важные конструктивные особенности. Во-первых, чтобы звук хорошо отражался от препятствий, датчик испускает ультразвук с частотой 40 кГц. Для этого в датчике имеется пьезокерамический излучатель, который способен генерировать звук такой высокой частоты. Во-вторых, излучатель устроен таким образом, что звук распространяется не во все стороны (как это бывает у обычных динамиков), а в узком направлении. На рисунке представлена диаграмма направленности типичного УЗ дальномера.
Из школьного курса физики мы знаем, что скорость звука в некоторой среде величина постоянная, но зависящая от плотности среды. Зная скорость звука в воздухе и время полета звука до цели, мы можем рассчитать пройденное звуком расстояние по формуле:
s = v*t
где v — скорость звука в м/с, а t — время в секундах. Скорость звука в воздухе, кстати, равна 340.29 м/с.
Чтобы справиться со своей задачей, дальномер имеет две важные конструктивные особенности. Во-первых, чтобы звук хорошо отражался от препятствий, датчик испускает ультразвук с частотой 40 кГц. Для этого в датчике имеется пьезокерамический излучатель, который способен генерировать звук такой высокой частоты. Во-вторых, излучатель устроен таким образом, что звук распространяется не во все стороны (как это бывает у обычных динамиков), а в узком направлении. На рисунке представлена диаграмма направленности типичного УЗ дальномера.
 Как видно на диаграмме, угол обзора самого простого УЗ дальномера составляет примерно 50-60 градусов. Для типичного варианта использования, когда датчик детектирует препятствия перед собой, такой угол обзора вполне пригоден. Ультразвук сможет обнаружить даже ножку стула, тогда как лазерный дальномер, к примеру, может её не заметить.
Если же мы решим сканировать окружающее пространство, вращая дальномер по кругу как радар, УЗ дальномер даст нам очень неточную и шумную картину. Для таких целей лучше использовать как раз лазерный дальномер.
Также следует отметить два серьезных недостатка УЗ дальномера. Первый заключается в том, что поверхности имеющие пористую структуру хорошо поглощают ультразвук, и датчик не может измерить расстояние до них. Например, если мы задумаем измерить расстояние от мультикоптера до поверхности поля с высокой травой, то скорее всего получим очень нечеткие данные. Такие же проблемы нас ждут при измерении дистанции до стены покрытой поролоном.
Второй недостаток связан со скоростью звуковой волны. Эта скорость недостаточно высока, чтобы сделать процесс измерения более частым. Допустим, перед роботом есть препятствие на удалении 4 метра. Чтобы звук слетал туда и обратно, потребуется целых 24 мс. Следует 7 раз отмерить, прежде чем ставить УЗ дальномер на летающих роботов.
Как видно на диаграмме, угол обзора самого простого УЗ дальномера составляет примерно 50-60 градусов. Для типичного варианта использования, когда датчик детектирует препятствия перед собой, такой угол обзора вполне пригоден. Ультразвук сможет обнаружить даже ножку стула, тогда как лазерный дальномер, к примеру, может её не заметить.
Если же мы решим сканировать окружающее пространство, вращая дальномер по кругу как радар, УЗ дальномер даст нам очень неточную и шумную картину. Для таких целей лучше использовать как раз лазерный дальномер.
Также следует отметить два серьезных недостатка УЗ дальномера. Первый заключается в том, что поверхности имеющие пористую структуру хорошо поглощают ультразвук, и датчик не может измерить расстояние до них. Например, если мы задумаем измерить расстояние от мультикоптера до поверхности поля с высокой травой, то скорее всего получим очень нечеткие данные. Такие же проблемы нас ждут при измерении дистанции до стены покрытой поролоном.
Второй недостаток связан со скоростью звуковой волны. Эта скорость недостаточно высока, чтобы сделать процесс измерения более частым. Допустим, перед роботом есть препятствие на удалении 4 метра. Чтобы звук слетал туда и обратно, потребуется целых 24 мс. Следует 7 раз отмерить, прежде чем ставить УЗ дальномер на летающих роботов.
2. Ультразвуковой дальномер HC-SR04
В этом уроке мы будем работать с датчиком HC-SR04 и контроллером Ардуино Уно. Этот популярный дальномер умеет измерять расстояние от 1-2 см до 4-6 метров. При этом, точность измерения составляет 0.5 — 1 см. Встречаются разные версии одного и того же HC-SR04. Одни работают лучше, другие хуже. Отличить их можно по рисунку платы на обратной стороне. Версия, которая работает хорошо выглядит так:
 А вот версия, которая может давать сбои:
А вот версия, которая может давать сбои:


3. Подключение HC-SR04
Датчик HC-SR04 имеет четыре вывода. Кроме земли (Gnd) и питания (Vcc) еще есть Trig и Echo. Оба этих вывода цифровые, так что подключаем из к любым выводам Ардуино Уно:| HC-SR04 | GND | VCC | Trig | Echo |
| Arduino Uno | GND | +5V | 3 | 2 |
 Внешний вид макета
Внешний вид макета

4. Программа
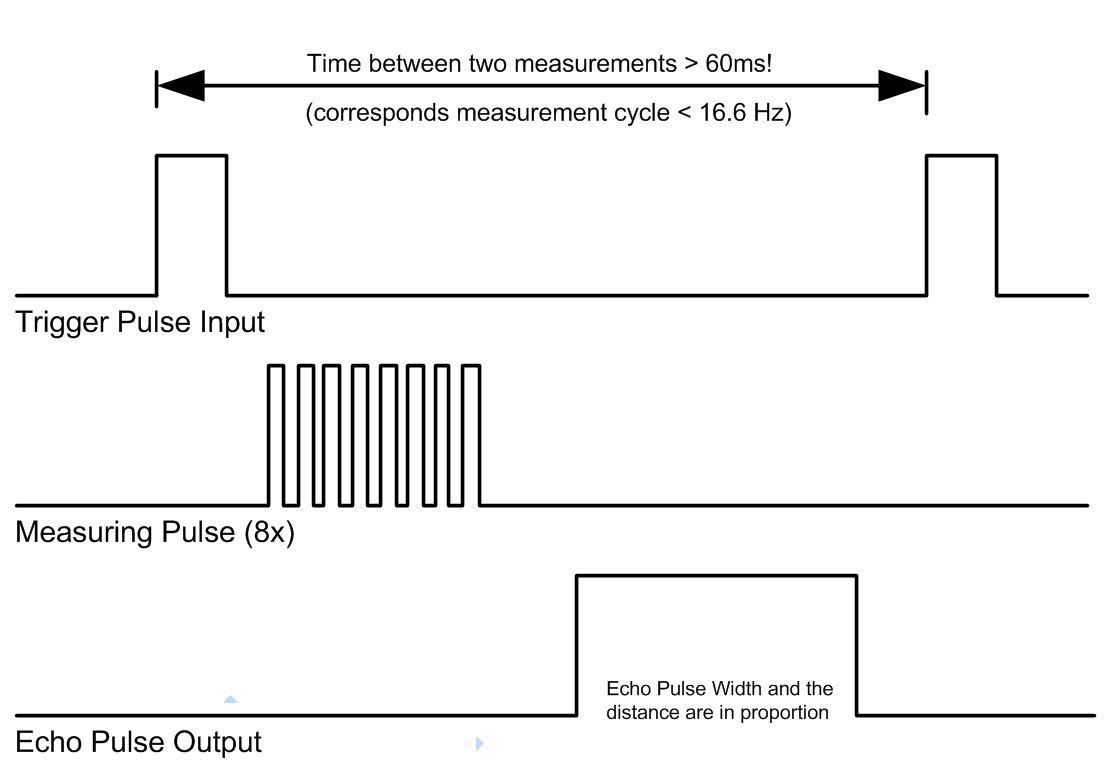
Итак, попробуем приказать датчику отправить зондирующий ультразвуковой импульс, а затем зафиксируем его возвращение. Посмотрим как выглядит временная диаграмма работы HC-SR04. На диаграмме видно, что для начала измерения нам необходимо сгенерировать на выводе Trig
положительный импульс длиной 10 мкс. Вслед за этим, датчик выпустит серию из 8 импульсов и поднимет уровень на выводе Echo
, перейдя при этом в режим ожидания отраженного сигнала. Как только дальномер почувствует, что звук вернулся, он завершит положительный импульс на Echo
.
Получается, что нам нужно сделать всего две вещи: создать импульс на Trig для начала измерения, и замерить длину импульса на Echo, чтобы потом вычислить дистанцию по нехитрой формуле. Делаем.
int echoPin = 2;
int trigPin = 3;
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
int duration, cm;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
cm = duration / 58;
Serial.print(cm);
Serial.println(" cm");
delay(100);
}
Функция pulseIn
замеряет длину положительного импульса на ноге echoPin в микросекундах. В программе мы записываем время полета звука в переменную duration. Как мы уже выяснили ранее, нам потребуется умножить время на скорость звука:
s = duration * v = duration * 340 м/с
Переводим скорость звука из м/с в см/мкс:
s = duration * 0.034 м/мкс
Для удобства преобразуем десятичную дробь в обыкновенную:
s = duration * 1/29 = duration / 29
А теперь вспомним, что звук прошел два искомых расстояния: до цели и обратно. Поделим всё на 2:
s = duration / 58
Теперь мы знаем откуда взялось число 58 в программе!
Загружаем программу на Ардуино Уно и открываем монитор последовательного порта. Попробуем теперь наводить датчик на разные предметы и смотреть в мониторе рассчитанное расстояние.
На диаграмме видно, что для начала измерения нам необходимо сгенерировать на выводе Trig
положительный импульс длиной 10 мкс. Вслед за этим, датчик выпустит серию из 8 импульсов и поднимет уровень на выводе Echo
, перейдя при этом в режим ожидания отраженного сигнала. Как только дальномер почувствует, что звук вернулся, он завершит положительный импульс на Echo
.
Получается, что нам нужно сделать всего две вещи: создать импульс на Trig для начала измерения, и замерить длину импульса на Echo, чтобы потом вычислить дистанцию по нехитрой формуле. Делаем.
int echoPin = 2;
int trigPin = 3;
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
int duration, cm;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
cm = duration / 58;
Serial.print(cm);
Serial.println(" cm");
delay(100);
}
Функция pulseIn
замеряет длину положительного импульса на ноге echoPin в микросекундах. В программе мы записываем время полета звука в переменную duration. Как мы уже выяснили ранее, нам потребуется умножить время на скорость звука:
s = duration * v = duration * 340 м/с
Переводим скорость звука из м/с в см/мкс:
s = duration * 0.034 м/мкс
Для удобства преобразуем десятичную дробь в обыкновенную:
s = duration * 1/29 = duration / 29
А теперь вспомним, что звук прошел два искомых расстояния: до цели и обратно. Поделим всё на 2:
s = duration / 58
Теперь мы знаем откуда взялось число 58 в программе!
Загружаем программу на Ардуино Уно и открываем монитор последовательного порта. Попробуем теперь наводить датчик на разные предметы и смотреть в мониторе рассчитанное расстояние.
Задания
Теперь, когда мы умеем вычислять расстояние с помощью дальномера, сделаем несколько полезных устройств.- Строительный дальномер. Программа каждые 100мс измеряет расстояние с помощью дальномера и выводит результат на символьный ЖК дисплей. Для удобства полученное устройство можно поместить в небольшой корпус и запитать от батареек.
- Ультразвуковая трость. Напишем программу, которая будет «пищать» зуммером с различной частотой, в зависимости от измеренного расстояния. Например, если расстояние до препятствия более трех метров — зуммер издает звук раз в пол секунды. При расстоянии 1 метр — раз в 100мс. Менее 10см — пищит постоянно.
Заключение
Ультразвуковой дальномер — простой в использовании, дешевый и точный датчик, который отлично выполняет свою функцию на тысячах роботов. Как мы выяснили из урока, у датчика есть недостатки, которые следует учитывать при постройке робота. Хорошим решением может стать совместное использование ультразвукового дальномера в паре с лазерным. В таком случае, они будут нивелировать недостатки друг друга.Входное напряжение 5 В постоянного тока, подаётся на выводы Vcc и GND датчика.
Подробнее о датчике:
Если подать положительный импульс на вход датчика TRIG длительностью 10 мкс, то датчик отправит звуковую волну (8 импульсов на частоте 40 кГц - ультразвук) и установит уровень логической «1» на выходе ECHO. Звуковая волна отразится от препятствия и вернётся на приёмник датчика, после чего он сбросит уровень на выходе ECHO в логический «0» (то же самое датчик сделает, если звуковая волна не вернётся в течении 38 мс.) В результате время наличия логической «1» на выходе ECHO равно времени прохождения ультразвуковой волны от датчика до препятствия и обратно. Зная скорость распространения звуковой волны в воздухе и время наличия логической «1» на выводе ECHO, можно рассчитать расстояние до препятствия.

Расстояние вычисляется умножением скорости на время (в данном случае скорости распространения звуковой волны V , на время ожидания эха Echo ). Но так звуковая волна проходит расстояние от датчика до объекта и обратно, а нам нужно только до объекта, то результат делим на 2:
L = V * Echo / 2
- L – расстояние (м);
- V – скорость звука в воздухе (м/с);
- Echo – время ожидания эха (с).
Скорость звука в воздухе , в отличии от скорости света, величина не постоянная и сильно зависит от температуры:
V 2 = γ R T / M
- V – скорость звука в воздухе (м/с)
- γ – показатель адиабаты воздуха (ед.) = 7/5
- R – универсальная газовая постоянная (Дж/моль*K) = 8,3144598(48)
- T ° К) = t°C + 273,15
- M – молекулярная масса воздуха (г/моль) = 28,98
Подставив в формулу известные значения γ , R , M , получим:
V ≈ 20,042 √T
- T – абсолютная температура воздуха (° К) = t°C + 273,15
Осталось объединить формулы вычисления V и L , и перевести L из м в см, Echo из с в мкс, T из °К в °C, получим:
L ≈ Echo √(t+273,15) / 1000
- L – расстояние (см)
- Echo – время ожидания эха (мкс)
- t – температура воздуха (°C)
iarduino_HC_SR04 и iarduino_HC_SR04_int , синтаксис обеих библиотек одинаков. Они сами рассчитывают все значения и возвращают только расстояние в см. Температура по умолчанию установлена в 23°C, но её можно указывать. Работа с библиотеками и их функции описаны ниже.
Для работы с датчиком, нами разработаны две библиотеки iarduino_HC_SR04 и iarduino_HC_SR04_int , синтаксис обеих библиотек одинаков.
- Преимуществом библиотеки iarduino_HC_SR04 является то, что датчики можно подключать к любым выводам Arduino , а недостаток заключается в том, что библиотека ждёт ответа от датчика, который может длиться до 38 мс.
- Преимуществом библиотеки iarduino_HC_SR04_int является то, что она не ждёт ответа от датчиков (не приостанавливает выполнение скетча), но выводы ECHO датчиков нужно подключать только к тем выводам Arduino , которые используют внешние прерывания.
Подробнее про установку библиотеки читайте в нашей .
Примеры:
Определение расстояния с использованием библиотеки iarduino_HC_SR04:
#includeОпределение расстояния с использованием библиотеки iarduino_HC_SR04_int:
#include Результат работы обоих примеров:

Из примера видно, что если во время измерений не учитывать температуру воздуха, то можно получить результаты с высокой погрешностью.
1 Принцип действия ультразвукового дальномера HC-SR04
Действие ультразвукового дальномера HC-SR04 основано на принципе эхолокации. Он излучает звуковые импульсы в пространство и принимает отражённый от препятствия сигнал. По времени распространения звуковой волны к препятствию и обратно определяется расстояние до объекта.
Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера. Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности логической единицы на ножке ECHO («Задержка эхо» на рисунке) определяется расстояние до препятствия.
Диапазон измерения расстояния дальномера HC-SR04 - до 4 метров с разрешением 0,3 см. Угол наблюдения - 30°, эффективный угол - 15°. Ток потребления в режиме ожидания 2 мА, при работе - 15 мА.
2 Схема подключения датчика расстояния
Питание ультразвукового дальномера осуществляется напряжением +5 В. Два других вывода подключаются к любым цифровым портам Arduino, мы подключим к 11 и 12.


3 Получение дистанции до объекта с датчика HC-SR04
Теперь напишем скетч, определяющий расстояние до препятствия и выводящий его в последовательный порт. Сначала задаём номера выводов TRIG и ECHO - это 12 и 11 пины. Затем объявляем триггер как выход, а эхо - как вход. Инициализируем последовательный порт на скорости 9600 бод. В каждом повторении цикла loop() считываем дистанцию и выводим в порт.
Const int trigPin = 12; const int echoPin = 11; void setup() { pinMode(trigPin, OUTPUT); // триггер - выходной пин pinMode(echoPin, INPUT); // эхо - входной digitalWrite(trigPin, LOW); Serial.begin(9600); // инициализация послед. порта } void loop() { long distance = getDistance(); // получаем дистанцию с датчика Serial.println(distance); // выводим в последовательный порт delay(100); } // Определение дистанции до объекта в см long getDistance() { long distacne_cm = getEchoTiming() * 1.7 * 0.01; return distacne_cm; } // Определение времени задержки long getEchoTiming() { digitalWrite(trigPin, HIGH); // генерируем 10 мкс импульс запуска delayMicroseconds(10); digitalWrite(trigPin, LOW); // определение на пине echoPin длительности уровня HIGH, мкс: long duration = pulseIn(echoPin, HIGH); return duration; }
Функция getEchoTiming() генерирует импульс запуска. Она как раз создаёт тот 10-микросекундный импульс, который является триггером для начала излучения дальномером звукового пакета в пространство. Далее она запоминает время от начала передачи звуковой волны до прихода эха.
Функция getDistance() рассчитывает дистанцию до объекта. Из школьного курса физики мы помним, что расстояние равно скорость умножить на время: S = V×t Скорость звука в воздухе 340 м/сек, время в микросекундах мы знаем (переменная duration ). Чтобы получить время duration в секундах, нужно разделить его на 1 000 000. Так как звук проходит двойное расстояние - до объекта и обратно - нужно ещё разделить результат пополам. Вот и получается, что расстояние до объекта S = 34000 см/сек × duration / 1 000 000 сек / 2 = 1,7 см/сек / 100, что мы и написали в скетче.
Операцию умножения микроконтроллер выполняет быстрее, чем операцию деления, поэтому :100 я заменил на эквивалентное ×0,01 .
4 Библиотека для работы с эхолокатором HC-SR04
Также для работы с ультразвуковым дальномером написано множество библиотек. Например, вот эта библиотека Ultrasonic . Установка библиотеки происходит стандартно: скачать, разархивировать в директорию /libraries/ , которая находится в папке с Arduino IDE. После этого библиотекой можно пользоваться.
Установив библиотеку, напишем новый скетч.
#include
Результат его работы тот же - в мониторе последовательного порта выводится дистанция до объекта в сантиметрах.
Если в скетче написать float dist_cm = ultrasonic.Ranging(INC); - дистанция будет отображаться в дюймах.
5 Выводы по работе с сонаром HC-SR04
Итак, мы с вами подключили к Arduino ультразвуковой дальномер HC-SR04 и получили с него данные двумя разными способами: с использованием специальной библиотеки и без.
Преимущество использования библиотеки в том, что количество кода значительно сокращается и улучшается читаемость программы, вам не приходится вникать в тонкости работы устройства и вы сразу же можете его использовать. Но в этом же кроется и недостаток: вы хуже понимаете, как работает устройство и какие в нём происходят процессы. В любом случае, каким способом пользоваться - решать только вам.
Приобрести ультразвуковой дальномер по хорошей цене можно